HAVP自主学习泊车(选配)
您的车辆上配有自主学习泊车功能,针对家庭、公司等场景的常用泊车路线,可以学习一次该路线,车辆下次即可自主前往目标车位,如果您将路线设置为“沿途车位”,车辆将寻找已学习路线上的空闲车位自主停泊。
车上配有12个超声波雷达和5个摄像头,可用来探测车辆周围的环境信息。您必须确保一直可以清晰地看到车辆,并时刻观察车辆及其周围情况:
-
前视摄像头,位于前风窗玻璃上。
-
前鱼眼摄像头,位于车头前部中央位置。
-
左鱼眼摄像头,位于左侧外后视镜下方。
-
右鱼眼摄像头,位于右侧外后视镜下方。
-
后鱼眼摄像头,位于车尾后部中央位置。
-
12颗超声波雷达,前后保险杠各6颗。
使用自主学习泊车前,需要对车辆进行路线“训练”,车辆自主学习后,将车辆行驶至学习起点,然后可在车内或者通过手机在车外使用,车辆自动控制刹车、加速、转向和挡位,自动驾驶至学习终点。自主学习泊车可支持垂直线车位入库或者出库路径,最多支持5条路径,每条至多100米。
自主学习泊车开关
自主学习泊车开关![]() 方向盘左侧按键区域,按下泊车开关,选择自主学习泊车。
方向盘左侧按键区域,按下泊车开关,选择自主学习泊车。
按下下泊车辅助开关,选择自主学习泊车。
可在多媒体显示屏中选择自主学习泊车。
路线学习流程
路线学习前:
确认所有摄像头和超声波雷达可正常工作,并保证车辆网络连接通畅;车辆保持静止,所有车门均关闭,后背门关闭,前舱盖关闭,保持后视镜展开。

开始路线学习:
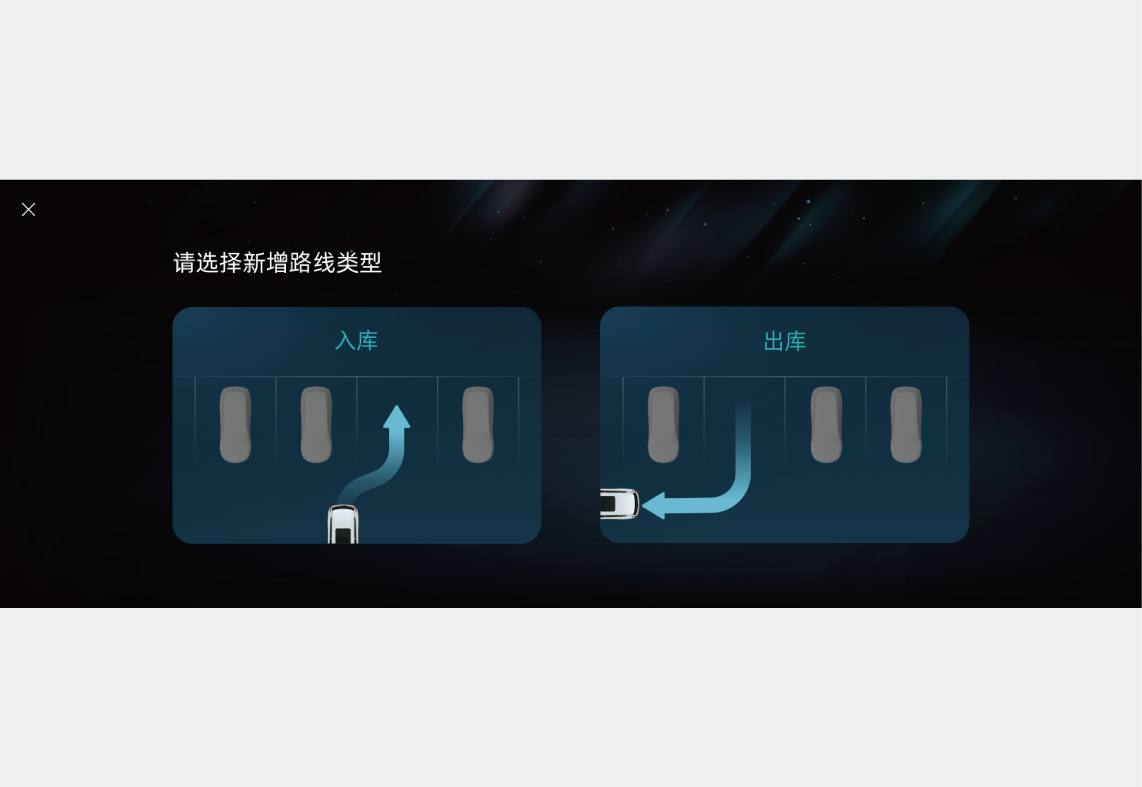
在多媒体显示屏中进入自主学习泊车界面,点击卡片上的“+”添加路线,开始路线学习。
-
如果需要学习一条泊车入库的路线,请选择“入库”类型。
-
如果需要学习一条泊车出库的路线,请选择“出库”类型。
-
-
选择学习线路类型后,根据界面提示依次进行起点、终点的选择设置。
路线保存:
完成上述操作后,系统将进行路线的学习,请耐心等待系统完成路线学习。路线保存过程根据网络状况和路线长度可能持续1-10分钟,系统将自动运行保存,您可正常下电离车,无需车内等待。如果网络状况良好,将加速路线学习进度。
路线命名:
系统完成路线学习后,界面自动跳转至路线命名界面,请对当前路线命名,便于后期路线使用。
在多媒体显示屏中使用路线流程
路线使用前,请完成一下操作:
-
车辆处于READY状态。
-
检查车辆摄像头、超声波雷达未被污损或遮挡(如被冰雪,雨水,污泥覆盖;或受其他贴纸,涂胶等覆盖物遮挡),该功能在摄像头校准的情况下可正常工作和使用。
-
提前将车辆驾驶至已学习路线的起点位置。
-
务必保持车辆静止,车门、前舱盖、后背门关闭、外后视镜完全展开。
-
挡位已切换到P挡且松开制动踏板。
-
请务必保持驾驶位有驾驶员,并系好安全带,对车辆状态完全监控。
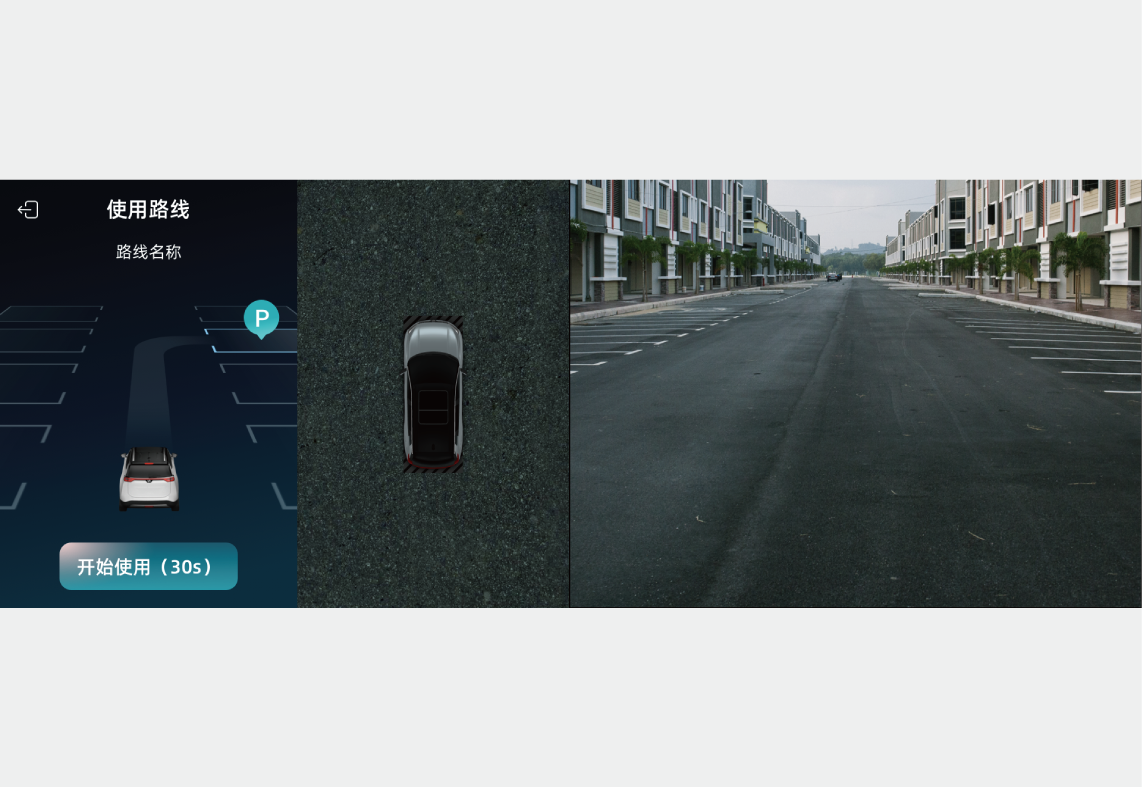
使用路线时,进入自主学习泊车界面,点击选择要是用的路线,匹配成功后,点击开始使用,车辆即可开始自动泊车。
未点击开始泊车时,请勿移动车辆,否则可能导致匹配失败。
使用过程中如果遇到障碍物、车门/车窗未关闭、安全带打开等情况,泊车将暂停;若2分钟内条件恢复,可点击继续泊车,执行剩余行程。
如遇潜在风险,请及时踩刹车或转动方向盘接管车辆。
在手机中使用路线流程
路线使用前,请完成一下操作:
-
将手机APP应用程序更新到最新版本,并确保您的手机已启用网络服务(或蓝牙已连接)。
-
请务必保持车辆在可视范围内,手机/车辆网络连接或蓝牙连接状况良好,且手机电量充足、手机触屏响应良好,没有潜在的卡死,闪退等异常情况。
-
检查车辆摄像头、超声波雷达未被污损或遮挡(如被冰雪,雨水,污泥覆盖;或受其他贴纸,涂胶等覆盖物遮挡),该功能在摄像头校准的情况下可正常工作和使用。
-
提前将车辆驾驶至已学习路线的起点位置。
-
若车内有人,请确保安全带已系好。
-
挡位已切换到P挡且松开刹车。
-
务必保持车辆静止,车门、前舱盖、后背门关闭、外后视镜完全展开。
需要使用路线时,在威马智行手机APP中点击智能泊车,进入自主学习泊车界面,点击选择要使用的路线,开始匹配。

路线匹配完成之后长按按钮,按钮变为绿色之后车辆开始启动自动驾驶,持续长按即可完成自动泊车。

使用路线前,务必确保车辆在已经学习的路线上,当前使用环境与学习时环境未产生较大变化(包括:光线变化、周围参照物变化等),否则可能导致匹配路线失败。
如遇潜在风险,请务必及时松开手机开始泊车按键。任意点击手机关机按键、音量按键、Home键等物理按键,也将控制车辆刹停。
自主学习泊车注意事项
以下的场景可能会导致学习失败或特殊物体无法正常识别:
-
学习场景过于空旷,周围无明显和典型特征。
-
学习路线上存在大面积重复特征。
-
学习路线上存在大面积积雪。
-
学习线路地面上存在大面积积水。
-
学习线路上有躺着或爬行的人。
-
学习线路地面上存在坑。
-
学习线路上存在悬空物体(例如凸出的消防栓、配电箱、摩托车后备箱、挂车、工程车等)。
-
学习线路上存在网状物体。
-
学习线路上存在绳索。
-
学习线路上存在树枝。
-
障碍物与背景色对比度接近的场景。
-
障碍物接地点不可见。
路线学习或使用前,请务必完全校准车辆摄像头,如果是手机使用,请将手机APP应用程序更新到最新版本,并确保您的手机已启用网络服务(或蓝牙已连接)。请务必保持车辆静止,四门两盖关闭。
路线学习,起点/终点设置需要注意以下几点:
-
车辆静止时方可设置起点/终点。
-
保持起点附近位置有明显的特征物。
-
车外环境光线充足,不建议夜晚学习。
-
车辆与前车保持距离。
-
保持摄像头没有遮挡。
路线示教过程中,需要注意以下几点:
-
驾驶车速不得超过15km/h。
-
驾驶距离不得小于5米,不得超过100米。
-
驾驶巡航过程中暂不支持倒车行为。
-
出库路线学习,暂不支持倒车出库。
-
入库路线学习,暂不支持车头扎入。
-
不建议在坡度过大的路段进行路线学习。
-
入库路线,暂不支持平行/由障碍物形成的空间型车位。
-
路线巡航阶段,需要经过目标车位,保证车辆已扫描到并记录车位信息。
路线保存中,需要注意以下几点:
-
如果网络状况良好,将加速您的路线学习进度。
-
路线保存过程根据网络状况可能持续1-10分钟左右,期间您可以驻车等待,或者来首音乐放松一下。
路线使用过程中,需要注意以下几点:
-
请将车辆驾驶至已学习路线起点位置,保证路线匹配成功。
-
系统可能无法识别某些障碍物,特别是某些可移动障碍物,如行人,儿童,动物等,系统性能可能受此类障碍物影响,在相应情况下使用自主学习泊车请保持警惕,并主动判断系统可能无法探测的障碍物,及时干预车辆使其停下(手机使用时,松开按钮;车机使用时,及时踩刹车)。
自主学习泊车功能无法在所有情况下都能检测到障碍物或发现周围潜在碰撞风险,若干因素影响会导致功能失效,响应延迟等。该功能需要您在使用过程中随时目视车辆及其周围环境,一旦发现潜在风险,请及时接管车辆。
系统可能无法识别某些障碍物,在相应情况下使用自主学习泊车请保持警惕,并主动判断系统可能无法探测的障碍物,及时干预车辆使其停下(手机使用时,松开按钮,多媒体显示屏使用时及时踩刹车或转动方向盘接管车辆)。
系统可能无法完全识别的障碍物包括不限于以下类别:
-
某些可移动障碍物,如行人,儿童,动物等。
-
地面坑洼,悬空、网状物体,绳索,树枝等。
-
障碍物接地点对摄像头不可见。
-
障碍物与环境背景色对比度接近的场景。
推荐使用场景
-
请在有固定参照物(如楼房、柱子、墙体、通风管道等)的停车场环境下使用。
-
请确保泊入、泊出的车位线清晰规范。
-
请在天气状况良好、光线良好停车场使用,如晴天、阴天、路面无明显积水积雪等。
-
当前位置已在选中路线且路线信息及周边环境未发生明显变化。
-
后视镜已经展开到位、摄像头和超声波雷达工作正常且未被遮挡。
-
周边环境安全,车底、两侧近距离内无障碍物。
-
车位无变化、未被占用且目标车位无地锁或地锁已调整至不影响车辆行进状态。
-
可在满足如上条件的地下或地上停车场使用。
自动泊车系统虽然能在泊车时为驾驶员提供帮助,但不能完全代替驾驶员进行泊车。驾驶员需要时刻关注周围环境,必要时需要人为干预。
车辆无法避免所有碰撞风险,使用过程中需要一直保持视距范围内的监控,必要时通过踩刹车、转动方向盘或松开手机控制按钮的方式进行接管。
在满足交通安全要求的场景下合理使用该功能,车辆控制人需对车辆和功能使用过程中的风险承担法律责任。
环境过于空旷,周围无明显和典型特征或大面积重复特征的场景将影响自主学习泊车性能。
摄像头逆光或光线不足,雨天、雪天等都有可能导致路线学习失败。
在特殊路面(例如:带凹坑、斜坡倾斜角度过大)使用时,自主学习泊车系统有可能无法适用。
请严格按照手机、多媒体显示屏中提示信息和用户手册进行自主学习泊车,不正确的操作可能会引起自动泊车系统退出甚至引发事故。
自主学习泊车系统仅限在您熟悉和可感知周围环境的停车场使用,切勿将自主学习泊车系统用于开放道路上。您必须持续监控车辆及周围环境,并做好随时接管车辆的准备。
请特别注意车辆周围的人、动物及各种栅栏,低矮路沿等障碍物,人流密集或其他有明显风险的环境,自主学习泊车系统无法保证在遇到所有障碍物时都能停下来,无法对所有交通状况都做出反应。
环境光线过暗,恶劣天气(如大雨、雪、雾、酷热或极寒温度等)导致传感器无法正常工作,或学习路线时差异极大的环境,自主学习泊车性能将受到影响。
自主学习泊车不支持在非正规停车区域使用。
请勿用水枪之类的高压水流直接喷洗,也不要用其他方式挤压或冲击自主学习泊车系统传感器表面,否则可能会导致其发生故障。
系统传感器的外表面切勿进行颜色喷涂,以免影响自主学习泊车系统性能。
请保持传感器外表面清洁,当发现有积雪、泥浆、霜、灰尘或其他障碍物覆盖时,请及时清除以免影响功能。
外部高频率的无线电或天线、车辆喇叭声、发动机的轰鸣声、车辆的排气声等声音过于接近自主学习泊车系统超声波传感器频率,影响摄像头能见度,如摄像头被遮挡,恶劣天气如雨天,雪天等影响传感器工作的环境,或影响手机车辆网络链接状况等情况,自主学习泊车性能将受到影响。
以上条件未尽述所有限制条件,请您使用时务必保持监控,如果操作不当或您监控不及时将导致人身伤亡。